

")

")
The Global Predictive Controller - autonomous, predictive water and sewer network optimization
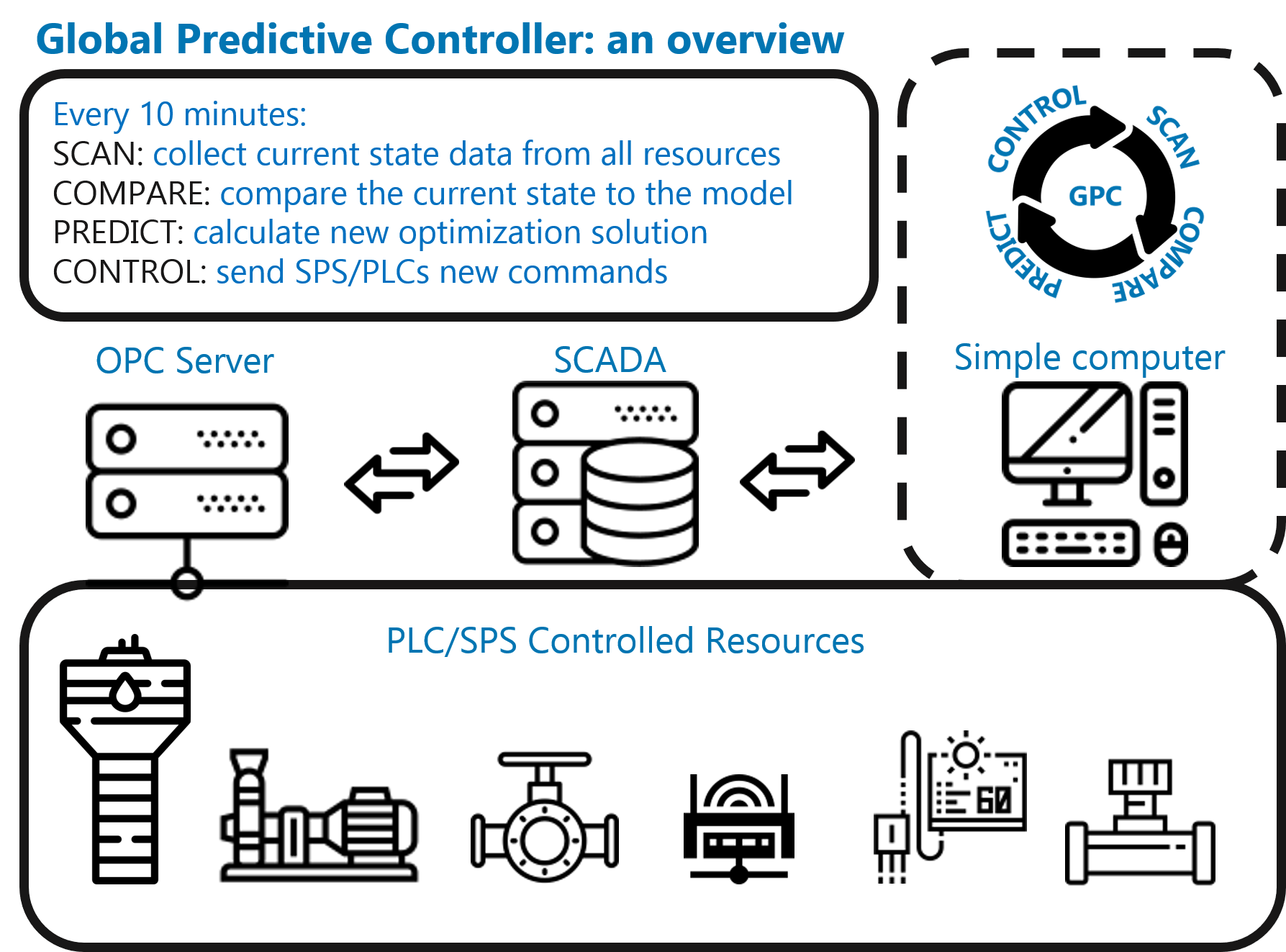
The Global Predictive Controller (or GPC) is designed to continuously analyze your network’s SCADA & PLC systems to monitor flow and storage throughout your network. It issues control commands every 15 minutes to optimize the efficiency of your network based on your pre-defined operational goals and objectives.
The GPC is fully autonomous and requires no operator intervention.
The GPC is not a rules-based system or advanced SCADA software. The GPC is like an “automatic pilot” which can react to optimization and emergency problems faster and more efficiently than a human operator can.
The Global Predictive Controller
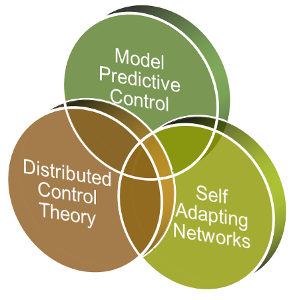
Our Global Predictive Controller™ (or GPC) is the result of over 10 years of research and development work. The software runs locally at your site and you have full control over its use. This application runs independently 24 hours a day / 7 days a week and continuously analyzes your network. It uses special algorithms and mathematical optimization to predict future consumption requirements and then adapts automatically to any changes it finds - without the need for operator intervention. The GPC is designed to determine the most efficient use of your existing infrastructure and then provide your PLC or SCADA systems with control commands which will maintain an optimal level of performance. In order to understand this technology better, it is easiest to visualize the software has having 3 core components:
Model Predictive Control
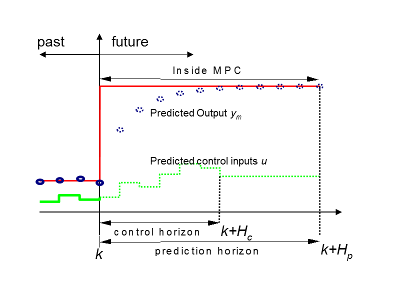
The heart of our platform is a Model Predictive Control module which has the ability to anticipate future events and can then perform control actions accordingly. Specifically, our customized MPC provides the following capabilities:
- Prediction of a defined set of input variables
- Model-based system prediction
- Quality function (pre-defined targets or goals)
- Optimization over the prediction horizon
Distributed Control Theory
If you are currently using SCADA systems you are familiar with the concept of autonomous controllers which may (or may not) be linked to one centralized, supervisory control module. Our GPC applies distributed control theory as a means to insure robust "fallback" positions for each individual controller if part (or all) of the system fails.
Self-Adapting Networks
The GPC has been designed to continuously and autonomously monitor your network and then make adjustments based on your predefined service goals and preferences. The "model" of your system is re-evaluated every 15 minutes and any changes (maintenance, changes in basin demand, disruptions, etc.) are used to automatically modify the operation of the network as a whole.